Seit langem herrscht ein Trend zum autonomen Fahren, insbesondere in Hinsicht auf den Transport von Personen. Dem fahrerlosen Fahren im Straßenverkehr der nahen Zukunft steht anscheinend kaum noch eine technische Hürde im Wege wie beispielsweise Tesla oder Google beweisen.
Die Autonomie von Arbeitsfahrzeugen/-maschinen, die keine Personen befördern, werden von diesem Trend allerdings nicht berücksichtigt.
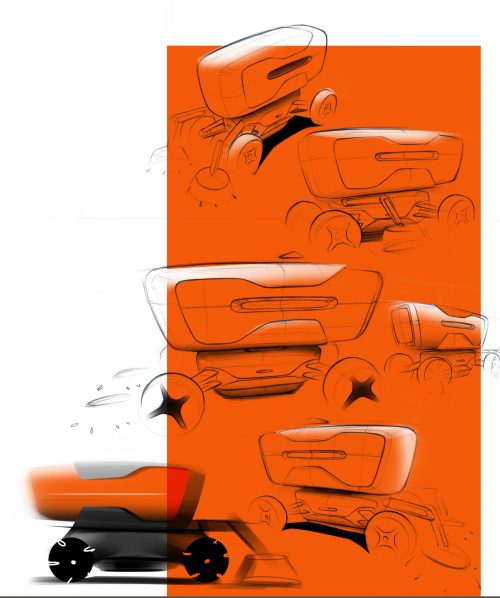
Einen dieser Arbeitsbereiche – die autonome Reinigung von Straßen und Wegen- stellte sich diese Bachelorarbeit von Robert Schäfer zur Aufgabe und will mit einem Entwurf eine Lösung dieses kommenden Aufgabenbereiches anbieten.
Der Entwurf präsentiert einen autonom fahrenden Roboter, der Straßen und Gehwege reinigt. Ähnlich wie aktuelle Kehrfahrzeuge sammelt er das Kehrgut ein und bringt es vollautomatisch zur Betriebsstätte. So bildet er das erste Glied im Arbeitsablauf bei der öffentlichen Reinigung im Reinigungssystem der Zukunft. Durch seinen Elektroantrieb ist er umweltschonender und leiser als herkömmliche Kehrfahrzeuge. Außerdem kann der Roboter breitachsig fahren, um so eine größere Fläche reinigen zu können.
Durch ein ausgeklügeltes Behältersystem muss der Roboter bei der Entladung seines Behälters nicht lange am Betriebshof stehen bleiben. Der volle Behälter wird lediglich gegen einen leeren ausgetauscht. So kann das Fahrzeug ohne lange Wartezeiten seine Arbeit weiter fortführen. Der Roboter arbeitet rund um die Uhr. Nur die Batterie des Roboters wird bei jeder zweiten Fahrt aufgeladen.